چگونه یک ربات با برد آردوینو بسازیم؟






یکی از سادهترین پروژههایی که میتوانید برای اولین بار با استفاده از برد آردوینو ایجاد کنید، ربات تشخیص موانع است. اگر شما در ابتدای راه هستید و در مورد برد آردوینو چیزی نمیدانید و میخواهید بیشتر در مورد آن بیاموزید، این آموزشِ نحوه ساخت ربات با برد آردوینو به شما اصول اولیه را آموزش میدهد. این پروژه به شما یک ایده روشن در مورد چگونگی ارتباط بین موتورهای DC، سنسورهای مادون قرمز (IR) و موتورهای پیشران با برد آردوینو ارائه میدهد. میتوانید از دانشهایی که از ساخت این ربات به دست می آورید، در دیگر رباتهایی که خواهید ساخت، استفاده نمائید. با برد آردوینو تشخیص مانع، میتوانید تمام اشیائی که در مسیر آن قرار میگیرد، تشخیص داده و از انحراف از مسیر موردنظر اجتناب کند. همین کار را میتوان با استفاده از الگوریتمهای مبتنی بر سنسور فراصوت و الگوریتم مبتنی بر PID (متناسب با انتگرال مشتق) به دست آورد. این مفهوم حتی در جاروبرقیهای رباتیک مانند Roomba استفاده شده است.
وسایل موردنیاز برای طراحی:
- برد آردوینو
- ماژولهای مادون قرمز (IR)
- موتور پیشران L293D
- دو عدد دنده موتور DC
- شاسی و چرخهای ربات
- چرخ Caster
- ورق و نوار دوطرفه
- جامپرهای نرینه/مادینه
- باتری 9 ولت
چگونگی کار ربات:
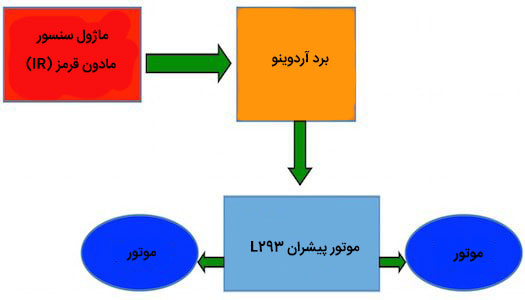
ربات Arduino از طریق پینهای آنالوگ، ورودی ماژولهای مادون قرمز (IR) را میخواند. با توجه به مقادیر دریافت شده از ماژول IR، ربات Arduino دو موتور را به طور جداگانه کنترل میکند. بنابراین، ساخت ربات به سمت چپ یا راست برای جلوگیری از برخورد با مانع خواهد بود.
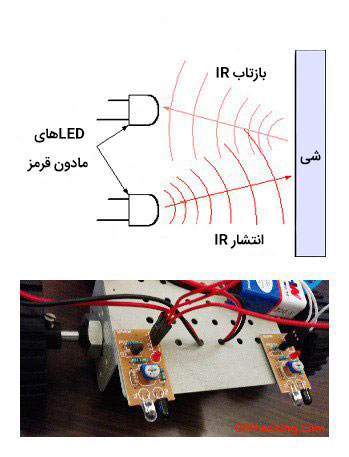
ربات Arduino، از دو ماژول سنسور IR استفاده می کند که می تواند اشیا را در محدوده 5-6 سانتی متر تشخیص دهد.
اتصال قطعات ربات آردوینو
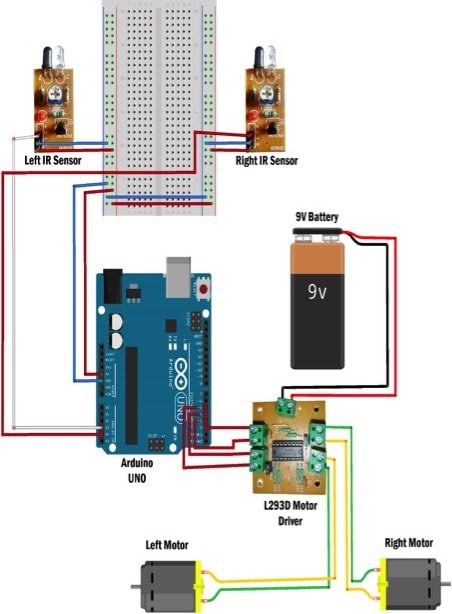
IC کنترلر موتور L293D برای کنترل دو موتور استفاده می شود. از یک موتور پیشران استفاده می شود زیرا آردوینو نمی تواند جریان کافی برای موتور پیشران فراهم کند. پین 2، 3، 4، و 5 در Arduino وارد ورودی L293D IC می شود. پین 2 و 3 سیگنال های کنترل برای موتور راست است و 4 و 5 سیگنال های کنترل برای موتور چپ است. باتری 9 ولت به موتور L293D متصل میشود. + 5V و GND به هر دو سنسور IR از Arduino داده می شود. خروجی های حسگر IR سمت چپ و راست به ترتیب به پین 3 و 4 آنالوگ بر روی Arduino اعمال می شود. خواندن از حسگر IR دارای مقادیر آنالوگ خواهد بود. به عنوان یک مانع مانع از سنسور، مقدار آنالوگ خروجی DOWN دیجیتال خواهد بود. خروجی از موتور پیشران (L293D) به دو موتوری که در نمودار دیده می شود، اتصال مییابد.
بررسی ماژولهای IR و DC Motors
بررسی کنید که آیا حسگرهای متصل IR در حال کار با Arduino هستند. برای انجام این کار، ماژول IR را به پینهای آنالوگ آردوینو وصل کنید و مقادیر دریافت شده در مانیتور سریال را بررسی کنید. سپس مقادیر مربوطه را هنگامی که یک جسم در مقابل سنسور IR است، پیدا کنید.
int value;
void setup(){
Serial.begin(9600);
}
void loop(){
value = analogRead(3);
Serial.print(" Sensor Left = "); // printing the values of both sensors into
Serial.print(value); // serial monitor for inspection value = analogRead(4);
Serial.print(" Sensor Right = ");
Serial.println(value);
delay(100);
}
 ارسال نظرات
ارسال نظرات






